
-
雷達(dá)測速儀簡介
雷達(dá)測試儀是通過微波來測量運(yùn)動(dòng)物體的速度,它基于多普勒原理,既當(dāng)微波照射到運(yùn)動(dòng)的物體上時(shí),會(huì)產(chǎn)生一個(gè)與運(yùn)動(dòng)物體速度成比率的一個(gè)變化,其變化大小正比于物體運(yùn)動(dòng)的速度。如當(dāng)目標(biāo)離雷達(dá)天線越近時(shí),反射信號頻率將高于發(fā)射機(jī)頻率,反之,亦然。
-
雷達(dá)測試儀的功能
-
通過模擬移動(dòng)目標(biāo)核實(shí)在實(shí)際多目標(biāo)距離條件下的運(yùn)行操作(其它媒介或者路旁目標(biāo))。
通過發(fā)送機(jī)、接收機(jī)和天線的全面表現(xiàn)說明雷達(dá)模塊的特色,綜合功能可以進(jìn)行雷達(dá)信號功率和頻率測試而不需要外部設(shè)備,并容許雷達(dá)訊號功率和測量頻率而無需外接其它設(shè)備。
可與外部的測試附件相接包括頻譜分析儀,功率計(jì)來增加彈性。

-
適合獨(dú)立的桌面上或暗室測試,及容易與其他的儀器整合到動(dòng)化的測試桌面上或在標(biāo)準(zhǔn)的生產(chǎn)線上去完成雷達(dá)模組的測試。
內(nèi)置激光設(shè)備以容許精確校正(RTS)天線,進(jìn)行雷達(dá)-正在測試之下而無需附加機(jī)械設(shè)備,通過簡化的功能測試和安裝時(shí)雷達(dá)感應(yīng)器(天線)的對準(zhǔn)校正來加快移動(dòng)生產(chǎn),容易地以一外部的計(jì)算機(jī)(經(jīng)由RS-232)或手持式人工控制器作外部控制。
-
-
雷達(dá)測試儀的工作原理
-
你一定有這樣的感覺,當(dāng)一輛拉著汽笛的火車從你身旁開過時(shí),它的聲調(diào)越來越高;而背離你遠(yuǎn)去時(shí),聲調(diào)又會(huì)越來越低。而且,車的速度越快,聲調(diào)變化的差別越大,這就是多普勒效應(yīng)。雷達(dá)槍就是根據(jù)這一原理研制的。
-
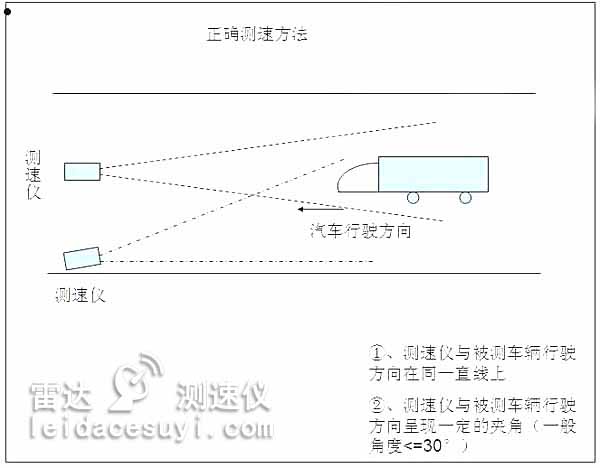
雷達(dá)發(fā)射的微波以一個(gè)扇型的方式出去(S1),在照射區(qū)域內(nèi)的目標(biāo)會(huì)對微波形成一個(gè)反射(S2),其中依據(jù)實(shí)際測量的要求,雷達(dá)又分為兩種工作模式:一種是靜態(tài)工作模式,一種是動(dòng)態(tài)工作模式。所謂靜態(tài):即雷達(dá)靜止不動(dòng)(不在運(yùn)動(dòng)的巡邏車內(nèi)),測迎面來的汽車或同向遠(yuǎn)離的汽車。所謂動(dòng)態(tài):既雷達(dá)處于運(yùn)動(dòng)狀態(tài)(一般在運(yùn)動(dòng)的巡邏車內(nèi)),測迎面來的汽車或同向遠(yuǎn)離的汽車,在動(dòng)態(tài)情況下,測試一般又分為反向測量和同向測量,反向測量:測試的目標(biāo)和巡邏車的運(yùn)動(dòng)方向相反,同向測量:測試的目標(biāo)和巡邏車的運(yùn)動(dòng)方向相同。選用不同的測試狀態(tài),雷達(dá)使用不同的運(yùn)算規(guī)則。雷達(dá)本身不易判別目標(biāo)的運(yùn)動(dòng)方向。
-
-
雷達(dá)測試儀的應(yīng)用問題及注意點(diǎn)
-
1.雷達(dá)測速儀是存在速度誤差的:
任何測試設(shè)備在測試實(shí)踐中都存在測量誤差,雷達(dá)測速儀也不例外,這叫誤差公理。如雷達(dá)載波頻率穩(wěn)定度(不穩(wěn)定是也)引起的誤差、電波多徑效應(yīng)引起的誤差、接收機(jī)噪聲引起的誤差、接收機(jī)終端信號數(shù)據(jù)處理誤差、測速原理性誤差、光速不準(zhǔn)確性引起的誤差、測速公式近似誤差、雷達(dá)設(shè)站不合理引起的誤差、使用環(huán)境變化引起的誤差等。
這些誤差因素的總合效果,應(yīng)該使雷達(dá)測速的總誤差 ≤1公理/小時(shí)。這里所說的測速總誤差 是均方根誤差,也叫標(biāo)準(zhǔn)偏差。它是指誤差發(fā)生的概率為0.683的那種誤差。誤差發(fā)生的概率為0.9973的誤差是3 ,它稱為最大誤差。比最大誤差3 更大的誤差發(fā)生的概率只有0.0007,一般認(rèn)為大于3 的誤差是反常誤差,或說出現(xiàn)了野值。野值在測速實(shí)踐中應(yīng)該加以剔除。火炮測速雷達(dá)的測速實(shí)踐中,發(fā)生野值的概率為0.05~0.25。
-
所以需要注意點(diǎn)是:
①測速雷達(dá)的最大誤差是3 =3公里/小時(shí),如果測出汽車超速2、3公里/小時(shí),而判汽車超速是不合理的;
②如果發(fā)生汽車超速太多,而司機(jī)又申訴說沒有超速,執(zhí)法交警應(yīng)該考慮雷達(dá)測速值是否是野值,不要急于判罰;
③測速雷達(dá)測量的汽車速度是雷達(dá)相對汽車的徑向速度,其值比汽車的真實(shí)速度小。二者距離在100米以外時(shí),不會(huì)對測速值有太大的影響,距離小于100米就測不準(zhǔn)了。
2.汽車速度指示器也是有誤差的:
汽車速度表指示的汽車速度值也是有誤差的。其誤差因素有原理誤差、制造誤差、速度表零位差、讀數(shù)誤差等。車主和司機(jī)應(yīng)認(rèn)識到從車速表讀出的汽車速度值是有誤差的。許多原因會(huì)影響速度表的準(zhǔn)頭,有時(shí)會(huì)有很大的誤差,受了罰要多從主觀上找原因。要經(jīng)常校準(zhǔn)你的速度表,不要等到受了罰才去校準(zhǔn)你的速度表。
校準(zhǔn)車速表有多種方法,方法之一是每次駕車駛過測速雷達(dá)時(shí),以車速表讀出值對照測速雷達(dá)測量值(包括罰單上給出的值),其差值就是車速表的誤差。如果誤差太大,就需要進(jìn)一步校檢你的汽車速度表了。這里介紹以另一種簡單有效的方法,就是用GPS導(dǎo)航儀來校準(zhǔn)你的汽車速度指示器,因?yàn)镚PS導(dǎo)航儀是一個(gè)高精度的測速設(shè)備,其測速誤差僅為0.1m/s。我們強(qiáng)調(diào)的是汽車速度指示器,包括速度表,不單純是速度表。具體方法是同時(shí)讀出并記錄二者的速度值,求其差值,而后計(jì)算汽車速度指示器的系統(tǒng)誤差和隨機(jī)誤差。試舉一例如下:
序號i 1 2 3 4 5 6 7 8
Vi 70 80 90 100 110 120 130 140
60.1 69.3 79.7 87.9 98.6 107 117 126
ΔVi 9.9 10.7 10.3 12.1 11.4 13 13 14
系統(tǒng)誤差計(jì)算結(jié)果為11.8km/h
隨機(jī)誤差 計(jì)算結(jié)果為1.47km/h
上表中數(shù)據(jù)的單位都是km/h(千米/小時(shí));
Vi 是汽車車速表讀出值;
另一行 是GPS導(dǎo)航儀讀出值;
i=1,2,…,n ;
n是試驗(yàn)的總次數(shù)。
計(jì)算結(jié)果表明車速表有較大的系統(tǒng)誤差,需要校正車速表。隨機(jī)誤差數(shù)值正常。
另外一次校檢結(jié)果為
系統(tǒng)誤差 3.0km/h,隨機(jī)誤差 1.46km/h。
這兩次校檢的系統(tǒng)誤差都是速度表的零位差,零位差是可以校正的。有時(shí)為了防止汽車超速,有意保留一定數(shù)值的零位差。
我們既要認(rèn)識到雷達(dá)測速儀有測速誤差,也要承認(rèn)汽車速度指示器有誤差,而且雷達(dá)測速儀測量速度值的誤差是汽車速度誤差和測速儀本身誤差之和。其數(shù)值應(yīng)為合理超速限應(yīng)該是超速限再加上(2~3)倍的誤差 =(3.6~5.4)km/h.
3.雷達(dá)測速儀的精度校驗(yàn)問題:
在目前,雷達(dá)測速儀的校檢問題比較混亂。有的計(jì)量測試單位用一個(gè)高精度的頻率發(fā)生器或某種高級音叉作為雷達(dá)精度校驗(yàn)標(biāo)準(zhǔn);有的計(jì)量測試單位只是檢測了雷達(dá)的一些技術(shù)指標(biāo),而沒有進(jìn)行精度校驗(yàn),這些做法值得商榷。雷達(dá)測速儀的精度測試應(yīng)分兩步進(jìn)行:第一步進(jìn)行靜態(tài)精度測試,第二步進(jìn)行使用環(huán)境下的動(dòng)態(tài)精度測試。但是不論作靜態(tài)精度測試還是作動(dòng)態(tài)精度測試,都要經(jīng)常用模擬測試?yán)走_(dá)工作是否正常。這個(gè)模擬信號源就相當(dāng)于有的計(jì)量單位使用的高精度頻率發(fā)生器或高級音叉。模擬信號源是不能測出雷達(dá)的測速精度的。
-
①靜態(tài)精度測試
是在實(shí)驗(yàn)室進(jìn)行的。測試方法略。
②動(dòng)態(tài)精度測試
是在試驗(yàn)場或?qū)嶋H使用環(huán)境下進(jìn)行的。基本的測試方法是比較法。比較法使用高精度測速設(shè)備作為比較標(biāo)準(zhǔn),和雷達(dá)測速儀一起同時(shí)測量一部汽車的速度,對其測速數(shù)據(jù)進(jìn)行比較,計(jì)算雷達(dá)測速儀的系統(tǒng)誤差和隨機(jī)誤差。這里要求作為比較標(biāo)準(zhǔn)的測速設(shè)備,其精度至少要比被測試的雷達(dá)測速儀的精度高3~5倍。GPS導(dǎo)航儀測速精度為0.1m/s,作為比較標(biāo)準(zhǔn)是綽綽有余的。但是在試驗(yàn)方法上是有一些具體問題要解決的。
4.野值剔除問題:
如何剔除超常數(shù)據(jù)(野值)是個(gè)很重要的問題。如果雷達(dá)測速儀性能符合要求,又剔除了野值,那么對超速的判罰就是合乎情理的。
只要雷達(dá)能在短時(shí)間內(nèi)連續(xù)測量多個(gè)數(shù)據(jù),例如10個(gè)數(shù)據(jù),并采用數(shù)據(jù)合理性檢驗(yàn)方法,就能有效的檢出并剔除野值。采用微處理器的雷達(dá)測速儀終端,是完全可以辦到的。
-
?聯(lián)系人:徐先生
?銷售電話:18042002123(同微信號)非售后
?QQ:464333839
?地址:杭州市余杭區(qū)億豐蔚藍(lán)郡雅苑3幢10(商)